Design contemporâneo de propulsor UUV


Do ponto de vista da física de propulsão de veículos, um veículo submarino não tripulado (UUV) é um pouco diferente do seu barco de esqui pessoal ou de um navio-tanque. Ele compartilha o modelo do sistema Vessel-Propulsor-Drive, que permite que um Propulsor converta a energia do Drive em propulsão com a finalidade de mover um Vessel. Os princípios básicos de equilíbrio de empuxo e movimento são comuns a todos os três, assim como a translação da energia de rotação para o impulso axial pelo elemento central do sistema - o Propulsor.
Não compartilhados por diferentes tipos de veículos são as restrições e objetivos de design que são exclusivos para a missão de cada veículo. Por exemplo, um barco de esqui pode precisar de um empuxo alto nas velocidades de reboque e está disposto a desistir da velocidade máxima em potencial para atingir esse requisito de missão. Sua relação de transmissão e as características da hélice são projetadas para este propósito. Um petroleiro pode precisar de sua maior eficiência na “velocidade dos negócios” para obter o maior retorno financeiro. Ou, adicionalmente, pode ter uma restrição para emissões ou redução de combustível, exigindo um comprometimento no projeto da hélice.
Os veículos subaquáticos têm seu próprio conjunto de requisitos de projeto de propulsores relacionados às suas diversas missões, como duração da bateria (ou maior distância percorrida para o orçamento da bateria), diâmetro máximo do corpo, velocidade operacional mínima, consideração de protetores ou bicos para eficiência hidrodinâmica ou segurança de contato da hélice ou redução de ruído para garantir operação silenciosa para coleta de dados. Este é o cenário para o nosso trabalho de projeto de propulsores UUV na HydroComp, e ele começa com uma entrevista com o cliente para colher as informações realmente importantes para um projeto de design de sucesso. O modelo Vessel-Propulsor-Drive é uma boa estrutura para essas discussões.
Embarcação
O típico UUV é uma forma de corpo de revolução (também chamada de forma axi-simétrica) que tem um nariz, corpo e cauda. Por causa do volume interno máximo para o equipamento, alguns veículos têm um nariz e uma cauda muito curtos. Como você poderia esperar, há uma certa penalidade de arrasto por um nariz rombudo e uma penalidade de propulsão por fluxo no propulsor que não é axial, mas ao longo de um declive íngreme. Parte do nosso trabalho é equilibrar a parte diferente da resistência - tomada de onda ou arrasto de pressão versus arrasto friccional ou viscoso - para obter o menor resultado de resistência a volume. Na verdade, isso não é totalmente verdade. Nós realmente queremos um resultado de menor potência para volume, e a geometria da cauda influenciará grandemente a capacidade do propulsor de desenvolver um impulso axial útil a partir da energia rotacional.
Portanto, muitos projetos de projetos de propulsores começam com a previsão dos coeficientes de arrasto e de propulsão de um veículo (fração de esteira e dedução de empuxo) usando o software NavCad® para simulação de sistema hidrodinâmico e de propulsão. Um módulo de veículo submersível específico fornece recursos de previsão robustos para formas de casco UUV tipo torpedo.
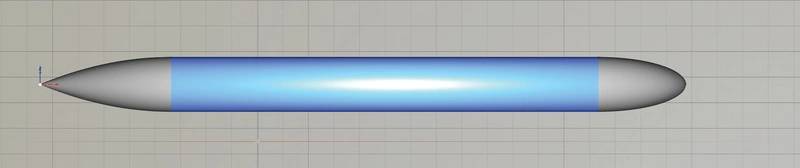 Imagem: Hydrocomp Drive
Imagem: Hydrocomp Drive
Do outro lado do Propulsor está o Drive, que normalmente é um motor elétrico. Os motores variam em características elétricas, mas os dados críticos para o projeto do propulsor são sua curva de potência mecânica de saída-RPM no eixo. A energia de entrada elétrica “a montante” é importante, é claro, e fornece uma restrição operacional. Caracterizamos a energia elétrica de entrada com a curva de eficiência do motor, o que ajuda a responder à pergunta: qual é o nosso intervalo de RPM alvo ideal se a maior duração da bateria for a maior prioridade? Por outro lado, é a curva de potência-RPM do eixo que nos indica as RPMs para a máxima potência de eixo possível e, por extensão, as RPMs para o máximo impulso potencial da propulsão e a velocidade do veículo.
Como você pode ver nas curvas representativas do motor de potência do eixo e eficiência elétrica versus RPM, a maior potência potencial raramente (ou nunca) ocorre com a maior eficiência de entrada elétrica. Por isso, muitas vezes temos que definir o ponto de projeto do RPM como um compromisso que não ofereça a maior potência nem a melhor eficiência elétrica.
Também relevante para qualquer discussão sobre UUVs acionados por motor é que as RPMs do eixo são quase sempre substancialmente altas demais para a operação ideal da propulsora. Não é incomum vermos alguma forma de engrenagem para alcançar o melhor desempenho do propulsor - ou aceitar que o propulsor possa estar operando com eficiência medíocre.
Propulsor
Você notará o uso do termo “propulsor” em vez de “propulsor”. Isso serve para reforçar o conceito de que um bocal e um propulsor (como encontrado na maioria dos UUVs e freqüentemente chamado de “propulsor” do veículo) é uma unidade interativa, o Propulsor. O projeto do propulsor é uma combinação de encontrar a melhor hélice e bocal (também chamado de duto ou cobertura), mantendo o controle de sua interação. Em outras palavras, você deve usar ferramentas de design que incluam essa interação, como NavCad para modelagem de sistema ou PropElements® para design de componentes de bicos de hélice.
Em todos os projetos de projetos de propulsores UUV, um objetivo universal é desenvolver uma geometria que gere a maior relação de empuxo-potência (sua eficiência), que alcançamos usando práticas bem estabelecidas. Geralmente, é a influência de drivers de design externos que podem tornar o projeto bem-sucedido do propulsor UUV tão desafiador. Por exemplo, o RPM pode ser muito alto (como mencionado acima). Restrições geométricas podem limitar o diâmetro máximo (para garantir que permaneça dentro do diâmetro do corpo) ou podem influenciar o projeto para levar em conta a inclinação da cauda do veículo.
É importante ter um momento e mencionar as implicações da fabricação de propulsores UUV. Há discussão substancial na imprensa sobre manufatura aditiva (AM) para hélices. Embora isso possa ser atraente do ponto de vista financeiro e de entregabilidade, devemos ter cuidado para que o desempenho não seja comprometido pela textura superficial inadequada (que pode ter uma enorme influência para o propulsor de pequeno tamanho encontrado na maioria dos UUVs), falhas de resistência à fadiga ou flexão hidro-elástica na lâmina. A HydroComp desenvolveu práticas de sucesso para o uso de AM para pequenos propulsores através de uma variedade de projetos de pesquisa internos.
Além dessas considerações práticas de design, um dos mais interessantes drivers de design contemporâneo é o tema do ruído irradiado. Como parte de uma iniciativa de sustentabilidade mais ampla, a HydroComp desenvolveu expertise na previsão e mitigação de hidroacústica de propulsão (o termo que captura o ruído e a vibração). Esse conhecimento também está sendo disponibilizado para outros arquitetos e engenheiros navais à medida que novos recursos hidroacústicos são desenvolvidos para nossas ferramentas. A sensibilidade de um projeto ao ruído é sempre parte da discussão com nossos clientes de engenharia de projeto de propulsores UUV.
Toda excitação hidroacústica é da flutuação de massa (o movimento periódico da massa fluida). A hidroacústica dirigida por propulsor é geralmente causada por variações nas zonas de baixa pressão da hélice quando ela gira dentro e fora de regiões “sombreadas”, como por trás de uma biela ou aleta de controle. Parte da flutuação é simplesmente da mudança na direção do fluxo ao redor da lâmina causada pelo influxo variável, mas mais significativamente pela rápida expansão e colapso da cavitação na lâmina. Cada uma delas é avaliada como parte de nosso projeto de propulsor, com mitigação conforme necessário pelas mudanças no contorno de uma lâmina e sua distribuição de inclinação de inclinação.
Excitação hidroacústica excessiva - e transmissão - também pode ser auxiliada por um design de bico criativo. Usando nossa experiência em modelagem de desempenho de bocal, podemos considerar se a geometria específica do bocal silencioso pode oferecer a supressão necessária, bem como qualquer perda de eficiência do propulsor.
Assim, enquanto o projeto de propulsores UUV tem sua coleção de desafios únicos, ainda é apenas uma tarefa componente dentro de um problema maior do sistema. Pode oferecer um desafio de engenharia satisfatório, que pode ser concluído com sucesso com um pouco de cuidado, ferramentas adequadas e experiência prática.
Sobre o autor
 Donald MacPherson, o autor.
Donald MacPherson, o autor.
Donald MacPherson, especialista líder em simulação de sistemas de propulsão, é o Diretor Técnico da HydroComp, onde supervisiona todos os serviços de desenvolvimento e engenharia de software. Formado pelo Webb Institute, ele é membro do SNAME e membro de seu Painel de Hidrodinâmica de Propulsão.
Nomes diversos: Par de navios transportadores de GNL

Os EUA afirmam ter realizado ataques retaliatórios contra o Irã.

No comando: como a Guarda Costeira dos EUA está moldando o futuro da energia nuclear marítima.

Trump suspende esforços para escoltar navios no Estreito de Ormuz
")

-realiza-170280 "O porta-aviões USS Abraham Lincoln (CVN 72) realiza operações de bloqueio dos EUA no Mar Arábico, em 16 de abril. (Foto da Marinha dos EUA)")




, realiza operações de bloqueio em 17 de abril de 2026. O Pinckney está destacado na área de operações da 5ª Frota dos EUA para apoiar a segurança e a estabilidade marítimas no Oriente Médio. (Foto da Marinha dos EUA)")
